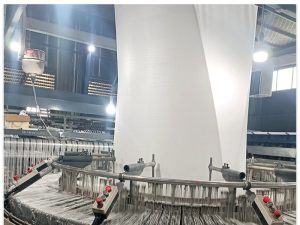
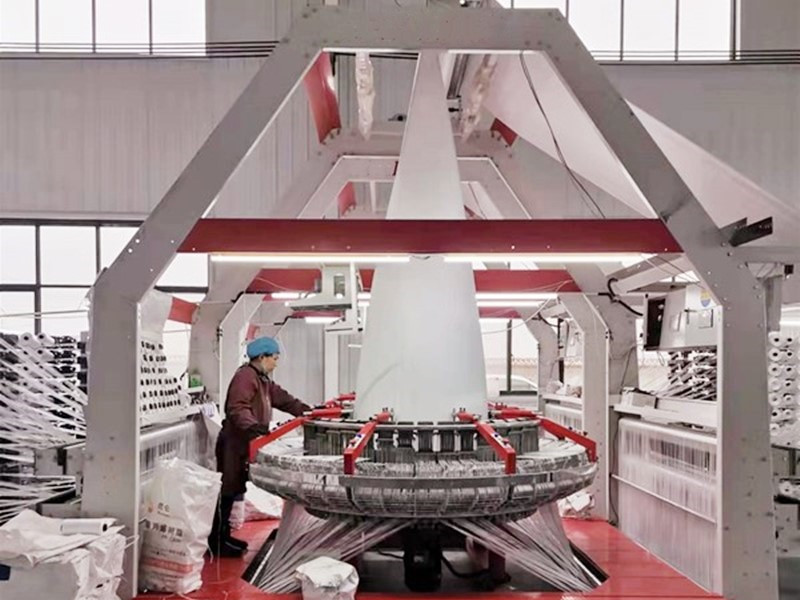
เครื่องทอผ้าทรงกลมจำนวน 10 เครื่องสำหรับถุงจัมโบ้


เครื่องทอผ้าทรงกลม 10 เครื่องเป็นตัวเลือกที่เหมาะอย่างยิ่งสำหรับการทอผ้าน้ำมันกันน้ำและกันแดด เมื่อมีสถานการณ์เช่นการแตกหักของเส้นโค้ง พุ่งขาด และพุ่งขาด เครื่องทอผ้าแบบวงกลมจะหยุดทำงานโดยอัตโนมัติ นอกจากนี้ยังมีฟังก์ชันอ่านมิเตอร์อัตโนมัติอีกด้วย เครื่องทอผ้าทรงกลมแปดเครื่องใช้การออกแบบระบบควบคุมความเร็วแบบไม่มีขั้นความถี่แบบแปรผัน พร้อมการควบคุมความเร็วที่ง่ายและสะดวก


ข้อมูลจำเพาะ
| ประเภท | ซีเอสเจ-2300-10S |
| จำนวนรถรับส่ง | 10 |
| กำลังหลัก | 5.5KW |
| การปฏิวัติ | 64รอบ/นาที |
| แบนคู่ | 1700 มม. - 2200 มม |
| ความกว้างของแทร็ก | 125มม |
| ความหนาแน่นของผ้า | 8-16 ชิ้น/นิ้ว |
| ความเร็วในการผลิต | 68ม./ชม.-120ม./ชม |
| จำนวนเส้นด้ายยืน | 2880 |
| เส้นผ่านศูนย์กลางโค้งสูงสุด | 140มม |
| เส้นผ่านศูนย์กลางผ้าสูงสุด | 100มม |
| ความกว้างของขดลวดสูงสุด | 2300มม |
| เส้นผ่านศูนย์กลางของขดลวดสูงสุด | 1200มม |
| ขนาดเครื่อง | (ย)1540X(ก)2680X(ส)4720มม |
| น้ำหนักเครื่อง | 7000กก |
 =
=
คุณสมบัติของอุปกรณ์:
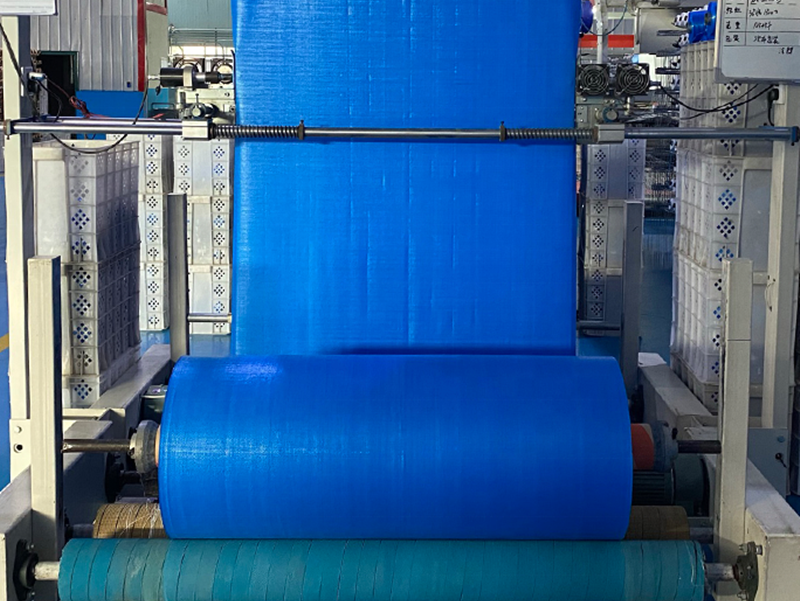
1. เครื่องนี้ถูกควบคุมโดยตัวแปลงความถี่ 5 ตัว รวมถึงการป้อนวาร์ปความถี่แบบแปรผัน การพันด้วยความถี่แบบแปรผัน และการยกผ้าแบบความถี่แปรผัน (ควบคุมโดยตัวเข้ารหัสคู่ โดยไม่มีเส้นพุ่งหลวมเมื่อหยุดและสตาร์ท) ทำให้พื้นผิวผ้าทอของอุปกรณ์นุ่มนวลขึ้น
2. เครื่องนี้สามารถแยกและม้วนได้สองเท่าโดยมีจำนวนเส้นด้ายยืนถึง 2,880 ชิ้นและสามารถทอถุงคอนเทนเนอร์และ geotextiles ที่มีความหนาแน่นสูงและเส้นใยสูงได้
3. เครื่องตรวจจับเส้นด้ายพุ่งประเภทเครื่องกำเนิดไฟฟ้ามีความละเอียดอ่อนและเชื่อถือได้ ไม่ได้รับผลกระทบจากฝุ่นและแสง ปลอดภัยและเชื่อถือได้ สามารถหยุดเส้นพุ่งที่หักและพุ่งสำเร็จรูปได้โดยอัตโนมัติ และมีอัตราข้อบกพร่องต่ำ
4. อุปกรณ์มีโครงสร้างที่เหมาะสมและเรียบง่าย มีความน่าเชื่อถือในการปฏิบัติงานสูง ชิ้นส่วนที่มีช่องโหว่น้อย การบำรุงรักษาที่สะดวก และค่าบำรุงรักษาต่ำ
5. ใช้การควบคุมความเร็วความถี่ตัวแปร เครื่องเริ่มต้นได้อย่างราบรื่นและทำงานได้อย่างน่าเชื่อถือ เครื่องจักรนี้ใช้ลูกเบี้ยวแบน การหล่อลื่นแบบไร้น้ำมัน และเสียงรบกวนต่ำ
6. การนำการควบคุมความเร็วความถี่ตัวแปรมาใช้ เครื่องจะสตาร์ทได้อย่างราบรื่นและทำงานได้อย่างน่าเชื่อถือ
7. ผ้าใช้ลายนูนลูกกลิ้งเหล็กและการสกัดยางอัดขึ้นรูป และควบคุมโดยการเขียนโปรแกรม PLC ด้วยอุปกรณ์ยกอิสระ